
WAL 日志并行回放
V11 / v1.1.17-学弈
2022/09/20
30 min
背景
在 PolarDB for PostgreSQL 的一写多读架构下,只读节点(Replica 节点)运行过程中,LogIndex 后台回放进程(LogIndex Background Worker)和会话进程(Backend)分别使用 LogIndex 数据在不同的 Buffer 上回放 WAL 日志,本质上达到了一种并行回放 WAL 日志的效果。
鉴于 WAL 日志回放在 PolarDB 集群的高可用中起到至关重要的作用,将并行回放 WAL 日志的思想用到常规的日志回放路径上,是一种很好的优化思路。
并行回放 WAL 日志至少可以在以下三个场景下发挥优势:
- 主库节点、只读节点以及备库节点崩溃恢复(Crash Recovery)的过程;
- 只读节点 LogIndex BGW 进程持续回放 WAL 日志的过程;
- 备库节点 Startup 进程持续回放 WAL 日志的过程。
术语
- Block:数据块
- WAL:Write-Ahead Logging,预写日志
- Task Node:并行执行框架中的子任务执行节点,可以接收并执行一个子任务
- Task Tag:子任务的分类标识,同一类的子任务执行顺序有先后关系
- Hold List:并行执行框架中,每个子进程调度执行回放子任务所使用的链表
原理
概述
一条 WAL 日志可能修改多个数据块 Block,因此可以使用如下定义来表示 WAL 日志的回放过程:
- 假设第
i条 WAL 日志 LSN 为 ,其修改了m个数据块,则定义第i条 WAL 日志修改的数据块列表 ; - 定义最小的回放子任务为 ,表示在数据块 上回放第
i条 WAL 日志; - 因此,一条修改了
k个 Block 的 WAL 日志就可以表示成k个回放子任务的集合:; - 进而,多条 WAL 日志就可以表示成一系列回放子任务的集合:;
在日志回放子任务集合 中,每个子任务的执行,有时并不依赖于前序子任务的执行结果。假设回放子任务集合如下:,其中:
- ,
并且 ,,
则可以并行回放的子任务集合有三个:、、
综上所述,在整个 WAL 日志所表示的回放子任务集合中,存在很多子任务序列可以并行执行,而且不会影响最终回放结果的一致性。PolarDB 借助这种思想,提出了一种并行任务执行框架,并成功运用到了 WAL 日志回放的过程中。
并行任务执行框架
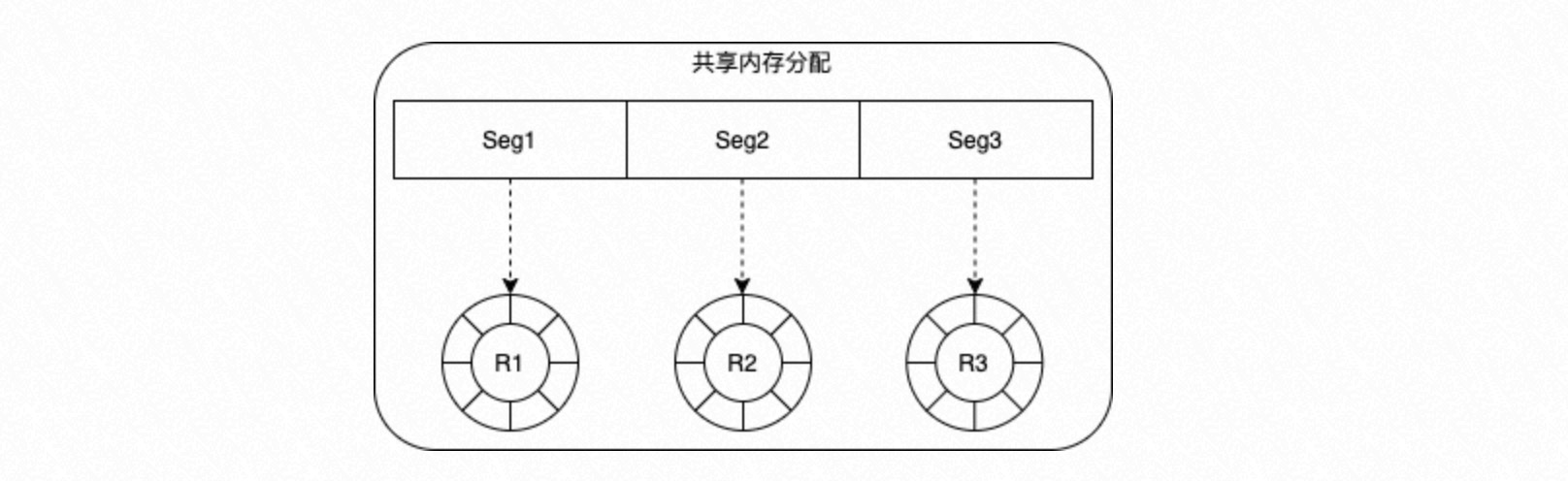
将一段共享内存根据并发进程数目进行等分,每一段作为一个环形队列,分配给一个进程。通过配置参数设定每个环形队列的深度:
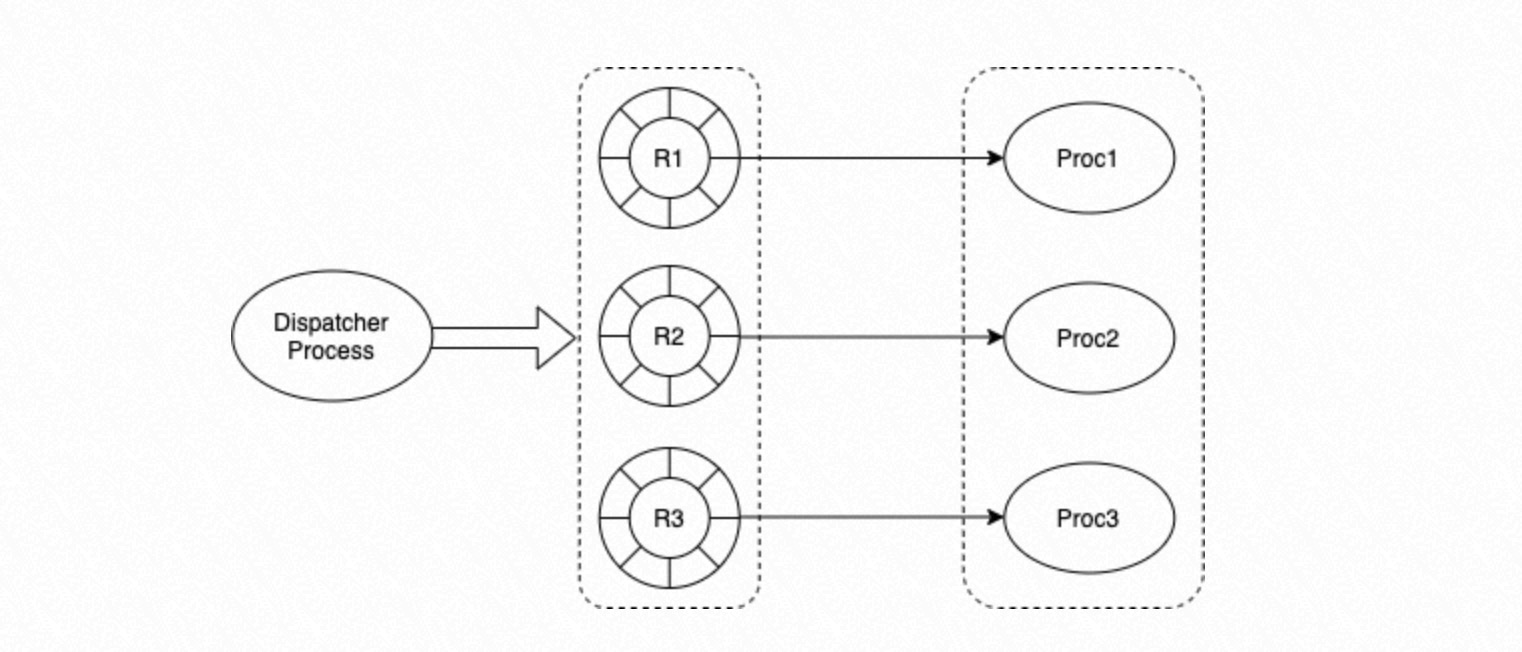
- Dispatcher 进程
- 通过将任务分发给指定的进程来控制并发调度;
- 负责将进程执行完的任务从队列中删除;
- 进程组
- 组内每一个进程从相应的环形队列中获取需要执行的任务,根据任务的状态决定是否执行。
任务
环形队列的内容由 Task Node 组成,每个 Task Node 包含五个状态:Idle、Running、Hold、Finished、Removed。
Idle:表示该 Task Node 未分配任务;Running:表示该 Task Node 已经分配任务,正在等待进程执行,或已经在执行;Hold:表示该 Task Node 有前向依赖的任务,需要等待依赖的任务执行完再执行;Finished:表示进程组中的进程已经执行完该任务;Removed:当 Dispatcher 进程发现一个任务的状态已经为Finished,那么该任务所有的前置依赖任务也都应该为Finished状态,Removed状态表示 Dispatcher 进程已经将该任务以及该任务所有前置任务都从管理结构体中删除;可以通过该机制保证 Dispatcher 进程按顺序处理有依赖关系的任务执行结果。
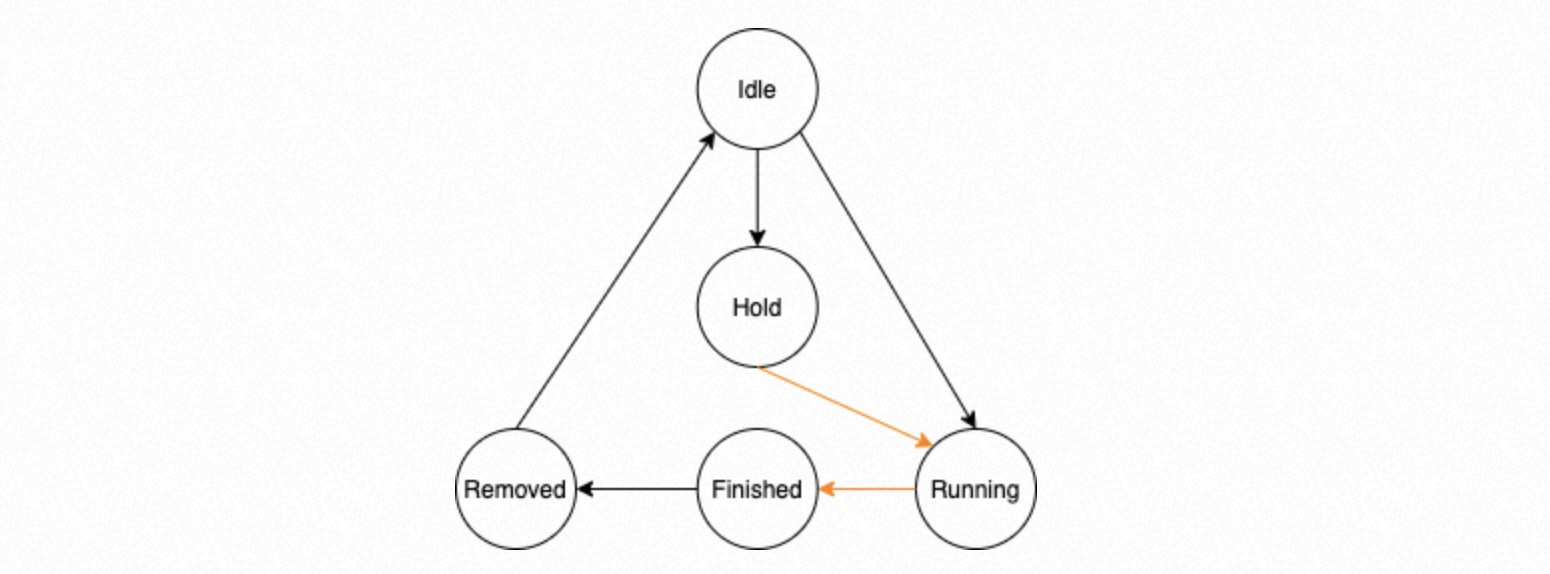
上述状态机的状态转移过程中,黑色线标识的状态转移过程在 Dispatcher 进程中完成,橙色线标识的状态转移过程在并行回放进程组中完成。
Dispatcher 进程
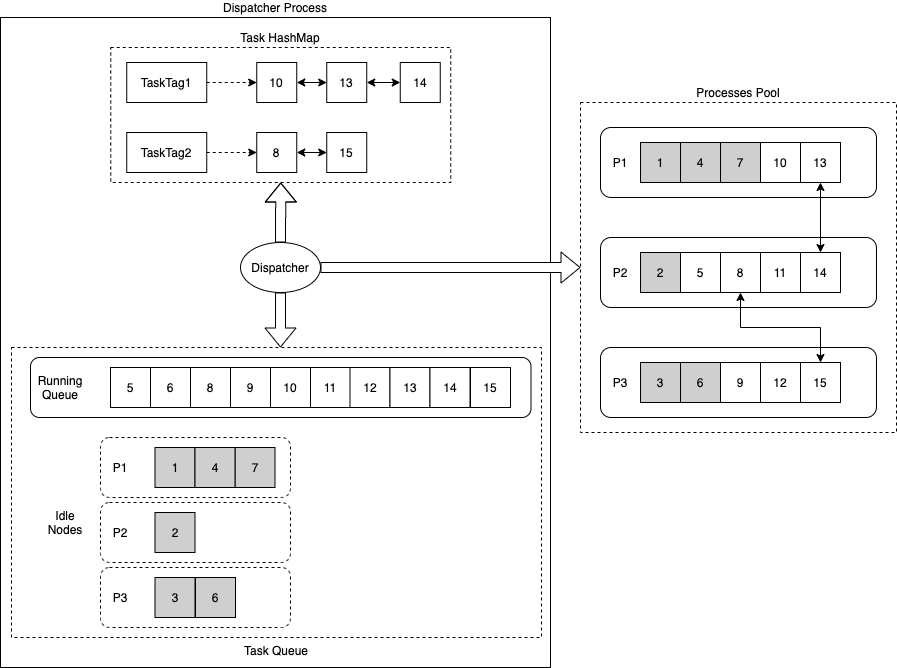
Dispatcher 进程有三个关键数据结构:Task HashMap、Task Running Queue 以及 Task Idle Nodes。
- Task HashMap 负责记录 Task Tag 和相应的执行任务列表的 hash 映射关系:
- 每个任务有一个指定的 Task Tag,如果两个任务间存在依赖关系,则它们的 Task Tag 相同;
- 在分发任务时,如果一个 Task Node 存在前置依赖任务,则状态标识为
Hold,需等待前置任务先执行。
- Task Running Queue 负责记录当前正在执行的任务;
- Task Idel Nodes 负责记录进程组中不同进程,当前处于
Idle状态的 Task Node;
Dispatcher 调度策略如下:
- 如果要执行的 Task Node 有相同 Task Tag 的任务在执行,则优先将该 Task Node 分配到该 Task Tag 链表最后一个 Task Node 所在的执行进程;目的是让有依赖关系的任务尽量被同一个进程执行,减少进程间同步的开销;
- 如果期望优先分配的进程队列已满,或者没有相同的 Task Tag 在执行,则在进程组中按顺序选择一个进程,从中获取状态为
Idle的 Task Node 来调度任务执行;目的是让任务尽量平均分配到不同的进程进行执行。
进程组
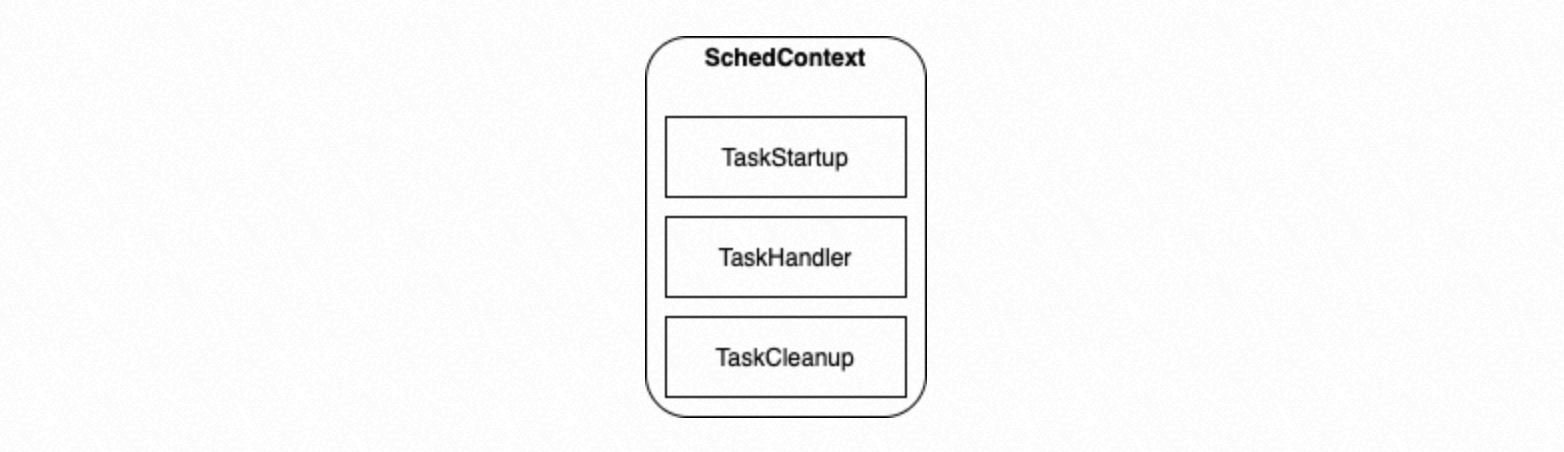
该并行执行针对的是相同类型的任务,它们具有相同的 Task Node 数据结构;在进程组初始化时配置 SchedContext,指定负责执行具体任务的函数指针:
TaskStartup表示进程执行任务前需要进行的初始化动作TaskHandler根据传入的 Task Node,负责执行具体的任务TaskCleanup表示执行进程退出前需要执行的回收动作
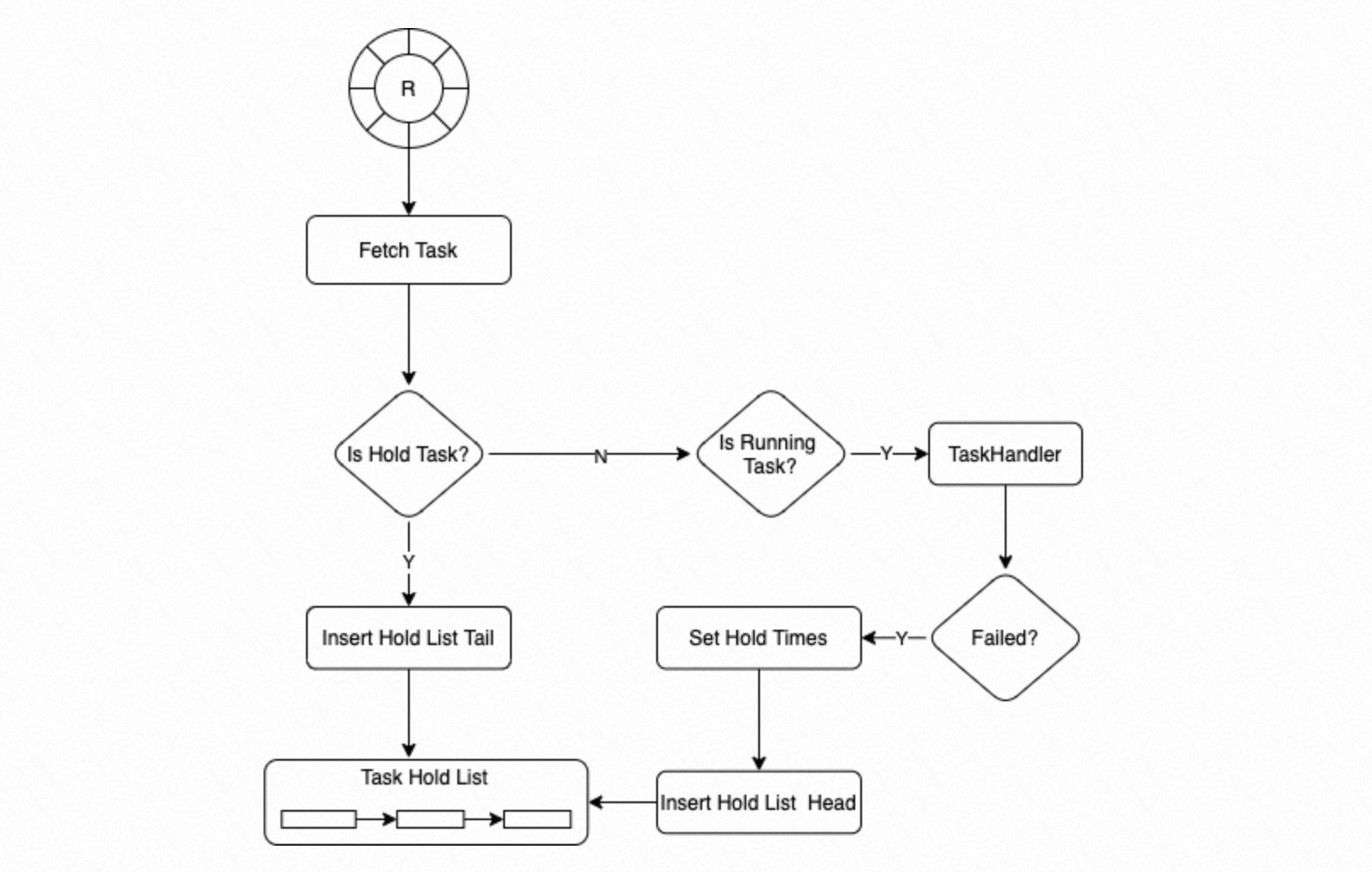
进程组中的进程从环形队列中获取一个 Task Node,如果 Task Node 当前的状态是 Hold,则将该 Task Node 插入到 Hold List 的尾部;如果 Task Node 的状态为 Running,则调用 TaskHandler 执行;如果 TaskHandler 执行失败,则设置该 Task Node 重新执行需要等待调用的次数,默认为 3,将该 Task Node 插入到 Hold List 的头部。
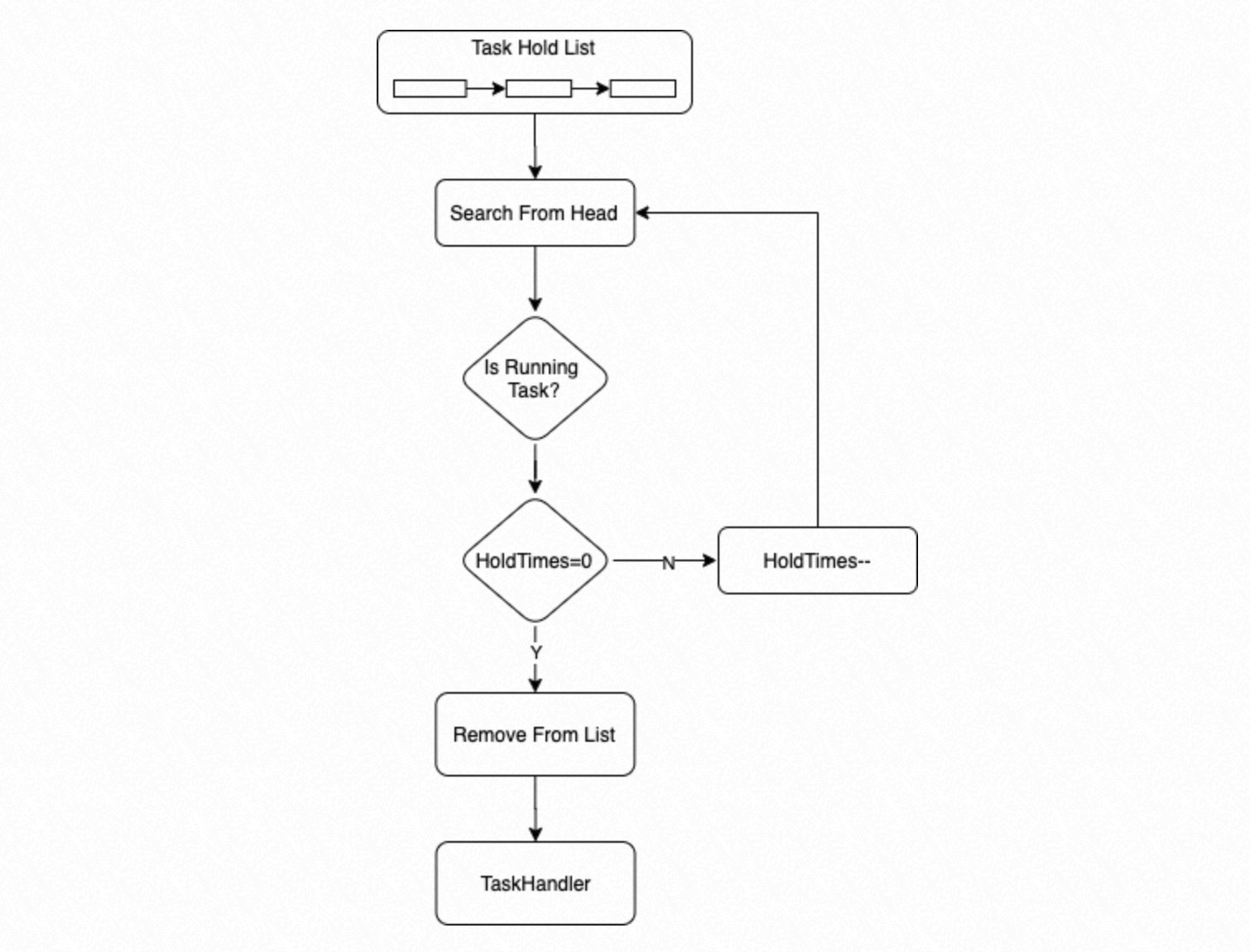
进程优先从 Hold List 头部搜索,获取可执行的 Task;如果 Task 状态为 Running,且等待调用次数为 0,则执行该 Task;如果 Task 状态为 Running,但等待调用次数大于 0,则将等待调用次数减去 1。
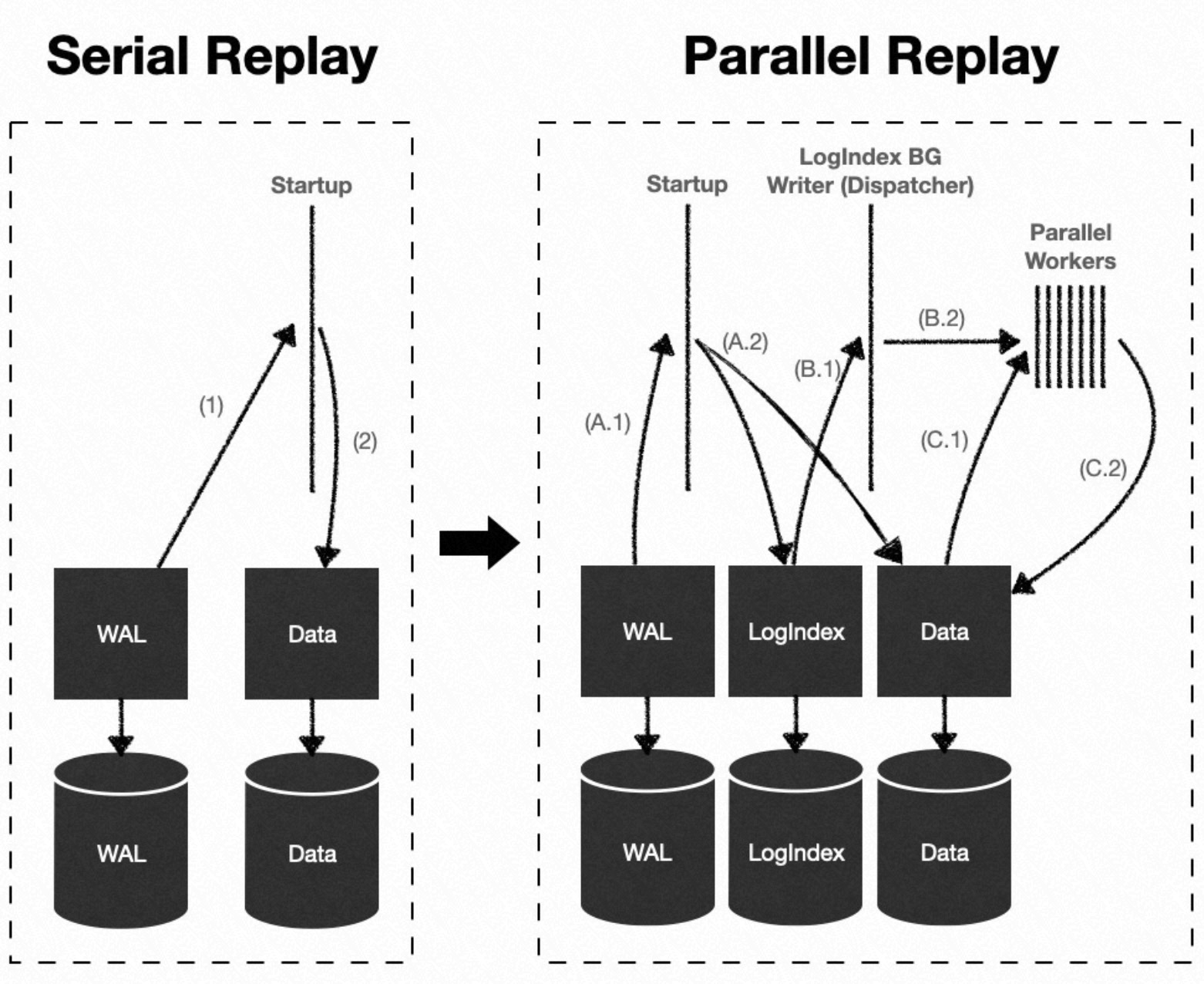
WAL 日志并行回放
根据 LogIndex 章节介绍,LogIndex 数据中记录了 WAL 日志和其修改的数据块之间的对应关系,而且 LogIndex 数据支持使用 LSN 进行检索,鉴于此,PolarDB 数据库在 Standby 节点持续回放 WAL 日志过程中,引入了上述并行任务执行框架,并结合 LogIndex 数据将 WAL 日志的回放任务并行化,提高了 Standby 节点数据同步的速度。
工作流程
- Startup 进程:解析 WAL 日志后,仅构建 LogIndex 数据而不真正回放 WAL 日志;
- LogIndex BGW 后台回放进程:成为上述并行任务执行框架的 Dispatcher 进程,利用 LSN 来检索 LogIndex 数据,构建日志回放的子任务,并分配给并行回放进程组;
- 并行回放进程组内的进程:执行日志回放子任务,对数据块执行单个日志的回放操作;
- Backend 进程:主动读取数据块时,根据 PageTag 来检索 LogIndex 数据,获得修改该数据块的 LSN 日志链表,对数据块执行完整日志链的回放操作。
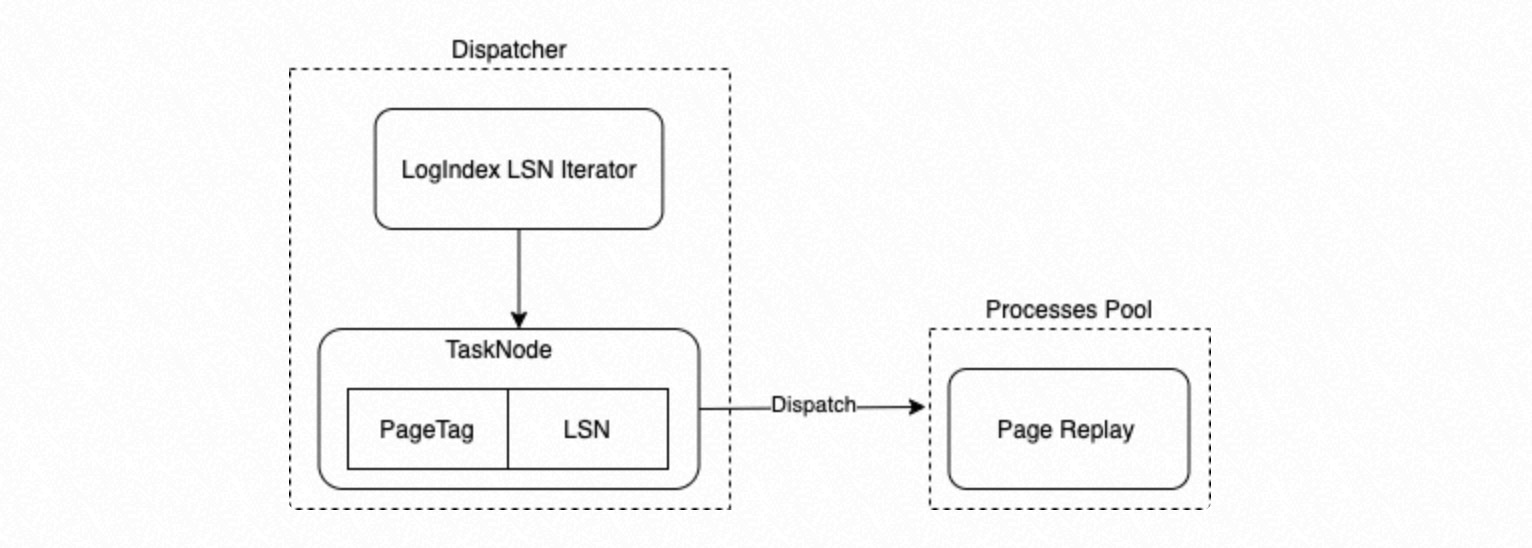
- Dispatcher 进程利用 LSN 来检索 LogIndex 数据,按 LogIndex 插入顺序枚举 PageTag 和对应 LSN,构建{LSN -> PageTag},组成相应的 Task Node;
- PageTag 作为 Task Node 的 Task Tag;
- 将枚举组成的 Task Node 分发给并行执行框架中进程组的子进程进行回放;
使用方法
在 Standby 节点的 postgresql.conf 中添加以下参数开启功能:
polar_enable_parallel_replay_standby_mode = ON